Service robotics

home > Organization > Research Team > Service robotics
1. Introduction
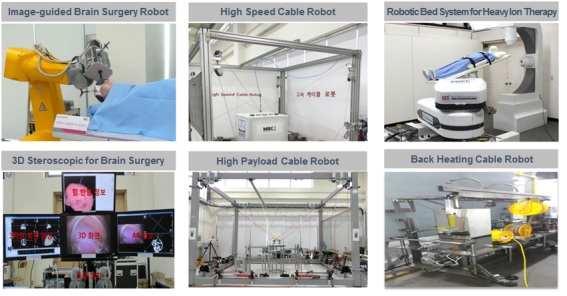
The objective of service robotics team is to develop advanced robotic systems applicable to the field of medicine, industry, and service using robotics and mechatronics technology. We develop and apply unique and task-oriented robotic technology required in a variety of industrial areas. In particular, through conducting projects, we have possessed source and core technologies of image-guided brain surgery robot, robotic bed system for heavy ion therapy, and cable-driven parallel robot (a novel type of parallel robot), etc. Those advanced technologies have been utilized to implement the systems for medical environment and industry sites. Service robotics team devote constant and pioneering effort to enhance global competitiveness in order to preoccupy future robotic technology and market.
2. Research issues
Main research issues of service robotics team are related to the development of commercialized system, especially utilizing technology of cable robots and surgical robot. For cable robots, we have been developing the industrial prototypes of high speed and high payload cable robot with large workspace to increase productivity and effectiveness. Refining cable robot technology includes improving accuracy and manipulation reliability, configuration calibration cable modeling, and vibration reduction. For surgical robots, we have improved robot*s accuracy, usability, and safety in clinical environment, such as compensating for patient*s weight and biological movement, 3D reconstruction and projection of surgical environment and force feedback, and patient protection using virtual wall and fail-safe operation.
3. Current projects
Service robotics team has been carrying out projects for cable robotics funded by government ministry and local government. The projects are ※Joint Robotics Laboratory of CNU RRI in collaboration with Fraunhofer IPA§ (Leading Foreign Research Institutes Recruitment Program) and ※Development of a smart winch system for a robust cable-driven parallel robot application§ (Root Industry Leading Company Promotion Program). The purposes of the projects are to develop key technology of cable robots by performing joint research on the core and application technology of cable robotics and the development of robust smart winch system, respectively. Also, we have been conducting the project funded by robotics company SMEC, ※Development of Robotic Couch Control Software for Heavy Ion Therapy§ in order to develop advanced control software for precise control of robotic bed for heavy ion therapy, which will provide patients suffering from cancer with non-invasive surgical intervention minimizing damages to neighboring normal cells.
4. Photo album