Multiscale actuator

home > Organization > Research Team > Multiscale actuator
1. Introduction
The Multiscale Actuator Team aims at developing cutting-edge technologies on biomedical robots at various multiscale: meso-scale (~100ˇŻs of Ąěm to a few mmˇŻs), micro-scale (10ˇŻs of Ąěm to 100ˇŻs of Ąěm) and nano-scale(nm). The Multiscale Actuator Team is keen to make breakthrough in next generation of biomedical robotics that will improve the targeted therapy and diagnosis based on advanced robotics, MEMS, nano- and bio-convergence technologies.
2. Research issues
The Multiscale Actuator Team is carrying out research to develop original and/or core technologies in the field of biomedical robots and related technologies. Its main research areas include:
Powering and control mechanism of various multiscale biomedical robots
Mechanism design and micro-fabrication technologies related to targeted therapy and diagnosis
3. Current projects
Active Capsule Endoscope
Core Technologies
Active locomotion technologies to overcome the limitations of the conventional flexible endoscopes and passive capsule endoscopes
Multi-functional capsule endoscopes including the performance of biopsies, drug delivery and tattooing
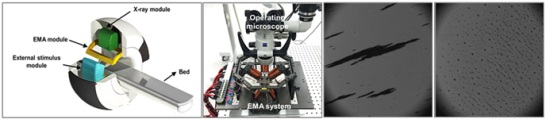
Externally Actuatable Nanorobot System
Core Technologies
Targeted nanorobot delivery and manipulation using an external navigation system
Modeling and control mechanism for swarm motion of nanorobots
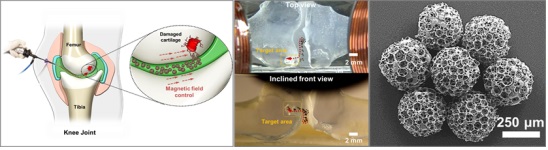
Stem cell-based Biomedical Microrobot
Core Technologies
Fabrication of a magnetically actuated micro-scaffold containing mesenchymal stem cells for articular cartilage repair
3D targeting control and fixation mechanism of multiple micro-scaffold using an external magnetic field generator
4. Photo album